|
As a new addition to the ‘Basic Specification 1.0” set of documents, CMC has published use case scenario specifications derived from accident analysis. The use cases describe some of the most common accident scenarios that result in PTW rider injuries: “Crossing” and “Left Turn”. The document describes such important use cases, taking PTW-specific characteristics into consideration, for Advanced Driver Assistance Systems (ADAS) based on on-board sensor systems such as camera or radar, and Cooperative Intelligent Transport Systems (C-ITS) technologies. Significant characteristics of PTWs are a basically smaller size and different driving dynamics compared to other types of vehicles. This may end up in a variety of dangerous situations: • Hidden behind another participant or object • Delay of detection by other road users such as car drivers • Hidden in the blind spot • Speed and distance being easily misjudged • Filtering through narrow space. In such cases, a warning (or active intervention) could have important safety benefits.  Time-To-Collision The basic criterion to decide whether a conflict situation is arising or not, is the Time-To-Collision (TTC). TTC defines what time is left before the conflict emerges. For the TTC calculation a path prediction is used assuming constant speed and trajectory for each participant at every point in time. If these paths cross and would lead to a collision, a TTC can be calculated. “Crossing Traffic” scenario The crossing traffic accident types according to the German In-Depth Accident Study (GIDAS) database describe a conflict between a road user (Participant A) who is obligated to wait and a road user (Participant B) entitled to the right of way. This scenario may occur at junctions and crossings of roads, field or cycle paths, railway crossings as well as property exits or parking lots. Ideally, Participant A should receive an advisory notification about the oncoming Participant B. In 62% of the analysed cases, a TTC calculation earlier than TTC = 2.6 s is possible and gives Participant A time to decelerate and let Participant B pass. If Participant A would start accelerating anyway, an active intervention combined with an earliest possible warning would mitigate the situation. 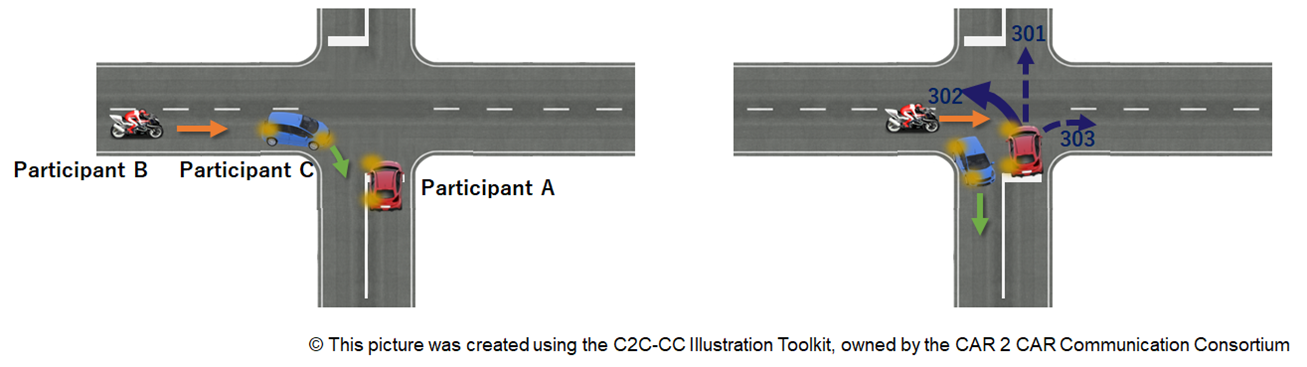 “Left Turn” scenario The left turn scenario is described by two or more road users in an oncoming traffic situation, with one of the participants intending to turn left. The one trying to turn may misjudge the speed and distance of or does not even recognise the one coming straight at all. The left-turning vehicle as main accident causer will be addressed. According to the GIDAS database the median differential speed between the two vehicles involved is 92 km/h. Furthermore, in 50% of all analysed cases, a TTC calculation was not possible earlier than TTC = 1.5 sec. Given these boundary conditions, an active intervention would have the highest expected safety benefit, followed by a warning with the aim of increasing driver/ rider situation awareness and stop turning. Providing an advisory notification will likely not prevent the accident due to the limited time resulting from the accident configuration. 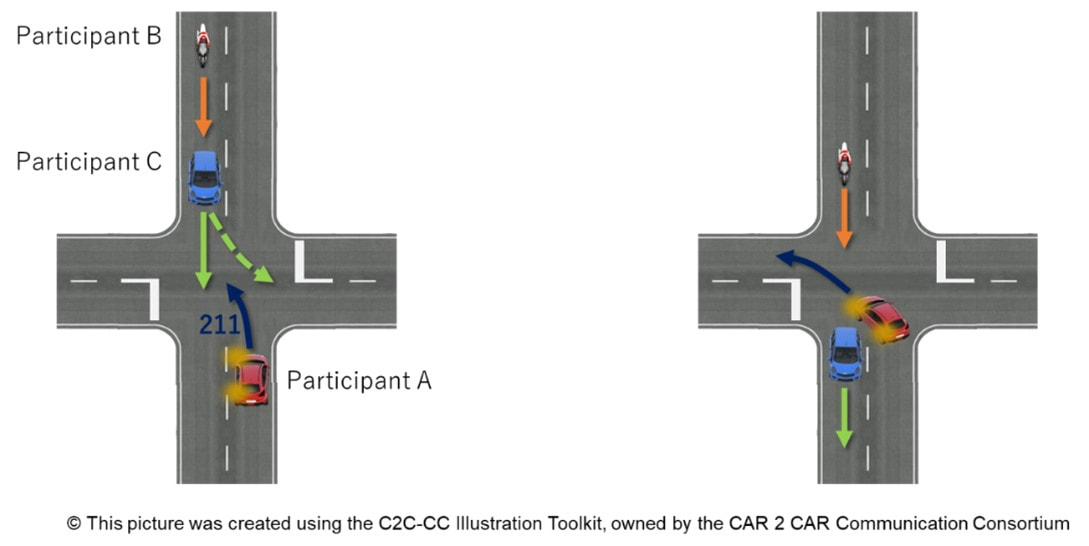 For more info please visit our web page about Use case specification here.
|
Archives
May 2024
|
 RSS Feed
RSS Feed
COPYRIGHT 2024 Connected Motorcycle ConsortiumContact Us |
|