|
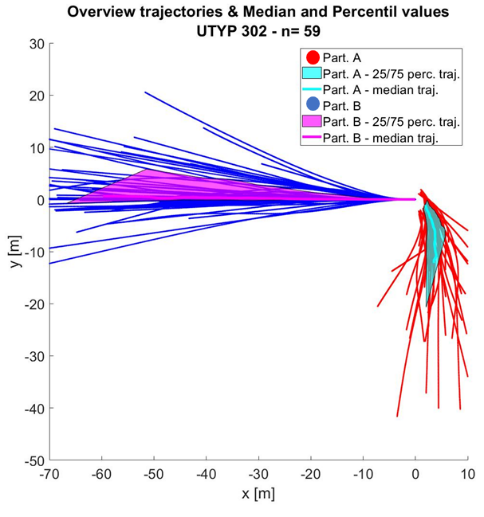
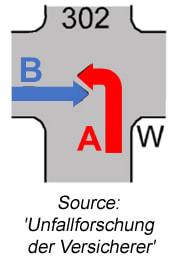
To understand how and why motorcycle accidents happen is the basis for accident prevention. As CMC points out, when motorcycles ‘talk’ to cars, a certain amount of collisions between cars and motorcycles may be avoided. In particular, road crossings are most critical places, where often a car driver oversees the oncoming motorcycle on the priority road.  Database analysis for definition of test cases With the support of VUFO GmbH, CMC has analysed real, reconstructed accidents based on a simulation database (GIDAS-PCM). Out of these accidents a ‘prototype’ average scenario is used. On the one hand to better understand the accident sequence, on the other hand, to derive test scenarios based on real accident data in order to develop and test future functionalities, technologies and connected systems. One of the frequent cases of the scenario group "Crossing traffic" (so called accident type 302) was analysed. In this accident type, participant A (usually a car) wants to turn left and disregards his obligation to wait. Involved party B (usually a motorcycle) approaches from the left.
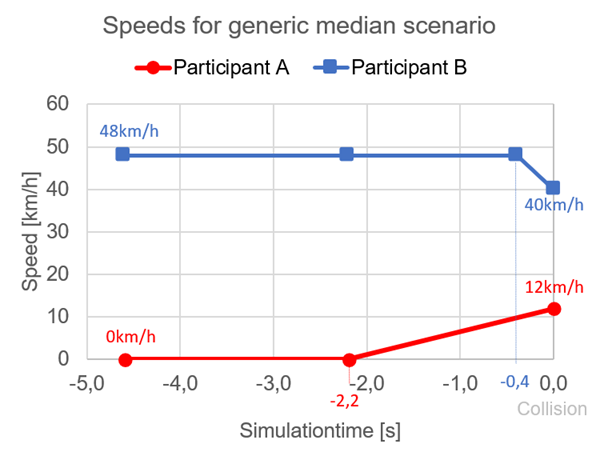
Figure 1: Accident type 302 - Crossing traffic with motorcycle approach from the left; Overview of trajectories. Vehicle-to-Vehicle connectivity allows for more reaction time for the motorcycle rider Based on the GIDAS-PCM, the trajectories, as well as the manoeuvres of both participants with their speeds and decelerations has been analysed and evaluated in a time-dependent way. The average result for all investigated cases is illustrated in Figure 2 with the corresponding velocity profiles. The good news: V2V connectivity shows a potential to avoid such accidents. The car driver (Participant A) starts accelerating already at 2,4 seconds after he has stopped and checked whether he can continue his manoeuvre. At the same time, the motorcycle rider (Participant B) obviously did not realize the car started to move. Only at 0,4 seconds before impact, the rider starts to brake. In contrast, with a Vehicle-to-Vehicle communication, the motorcycle rider could have been informed well 2 seconds ahead of the possible impact to perform braking. At the same time, also the car driver will be alerted as soon as he starts accelerating and has time to stop his manoeuvre.
Input to further research
This example described the average situation, but in reality the time sequences have a certain spread which is also analysed by our researchers. Those accident research findings allow developing a test scenario, which can be used for system tests in the simulation and for real field tests. In addition, the evaluated accident data could determine system limits and to identify warning times for riders/drivers. CMC will investigate further relevant accident types in order to provide even better support for riders/drivers in critical scenarios with systems in the future. |
Archives
May 2024
|
 RSS Feed
RSS Feed
COPYRIGHT 2024 Connected Motorcycle ConsortiumContact Us |
|